义昂智能
Franka金牌经销商tacbot.cn


 15000306001
15000306001
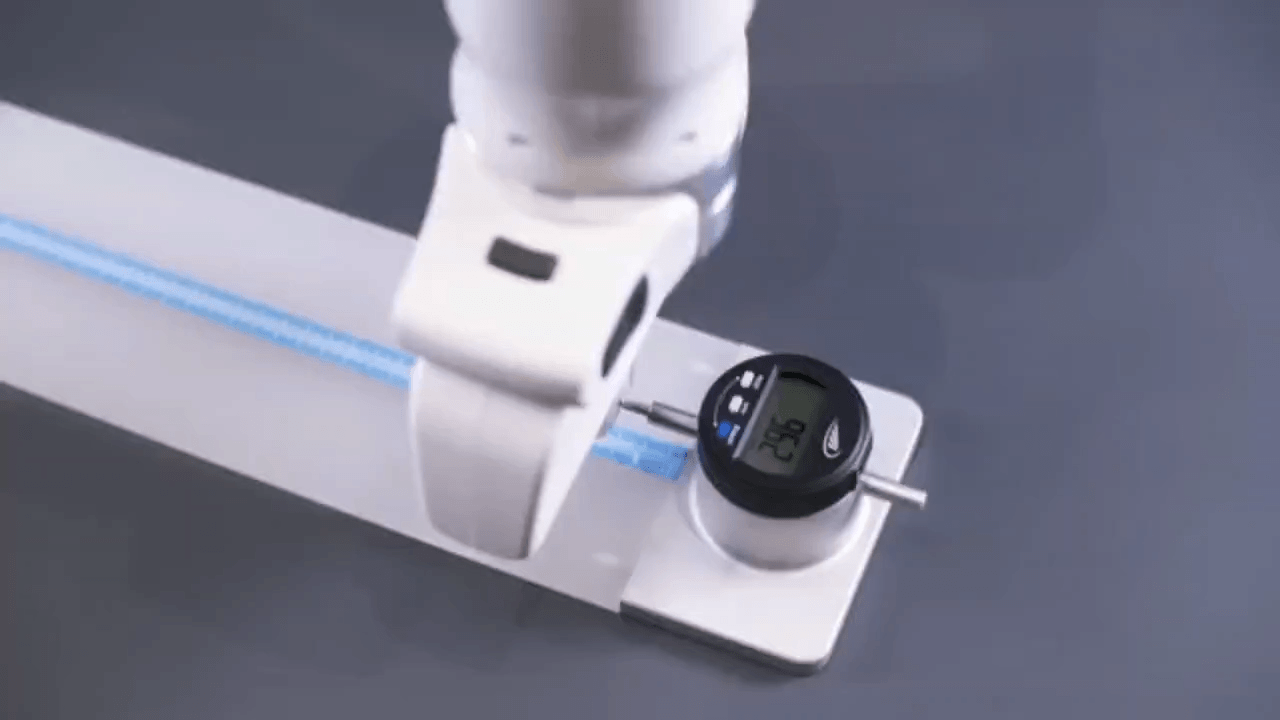
在人工智能技术的飞速发展下,具身智能作为AI领域的一个细分市场,正受到越来越多的关注。具身智能强调智能体在物理环境中的交互和学习,致力于提升智能系统适应复杂场景的能力。Franka Robotics所推出的FR3机器人,凭借其精密的设计和创新的控制系统,已成为具身智能研究的前沿探索的强大支撑平台。
FR3机器人以其卓越的性能和广泛的兼容性,已成为Google DeepMind、斯坦福大学、麻省理工学院等全球顶尖科研机构的主要实验平台。在这些机构中,FR3被用于探索具身智能的基础算法研究,尤其是在强化学习和深度学习领域的应用。
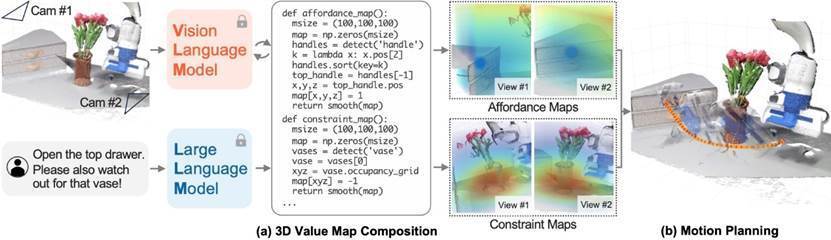
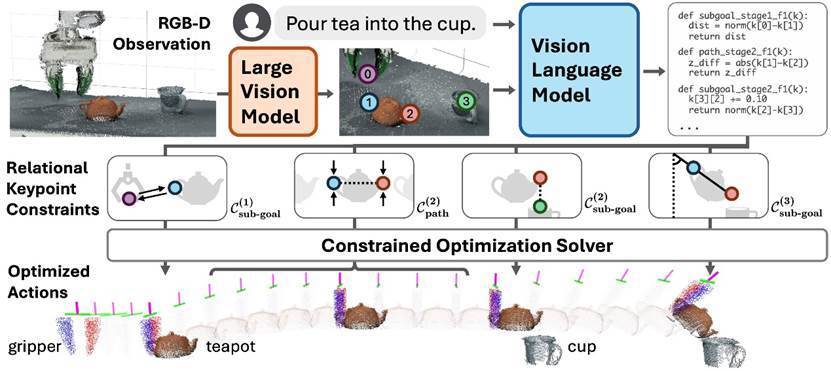
例如,斯坦福大学的李飞飞团队基于Franka机器人提出了“Digital Cousin”、“VoxPoser”、“ReKep”等创新性理论和方法。
VoxPoser项目:https://voxposer.github.io/
ReKep项目:https://rekep-robot.github.io/
而清华大学高阳研究组选用Franka机器人作为验证平台,其在2024年CoRL中获得了X-Embodiment Workshop论文奖。清华团队此次获奖的论文标题为《Data Scaling Laws in Imitation Learning for Robotic Manipulation》,关注的是数据规模定律在机器人操作中的模仿学习中的应用,尤其是能否通过适当的数据规模来实现零样本泛化。
Open X-Embodiment是一个国际合作项目,旨在推动机器人学习领域的发展。该项目通过集结来自全球21个机构、22种不同机器人的100万多个真实轨迹数据,创建了迄今为止最大的开源真实机器人数据集。这些数据集覆盖了单臂、双臂乃至四足机器人等多种形态,展示了527种技能,共计160266个任务。
Franka 机器人作为参与该项目的重要硬件之一,其机器人平台被纳入Open X-Embodiment的数据集中。Franka的机器人以其高精度和灵活性,在数据收集和技能展示中扮演了关键角色,为项目提供了项目宝贵的实验数据和应用场景。通过这些数据,Franka Robotics的机器人帮助研究人员探索跨机器人策略的可行性,即训练一个能够适应不同机器人、任务和环境的通用模型。Franka机器人被众多研究机构选中,并贡献了整个项目近25%的数据集,这不仅增强了Open X-Embodiment数据集的多样性,也为整个机器人学习领域的发展提供了重要支持。
(项目主页:https://robotics-transformer-x.github.io/)
FR3的技术特性使其在实际生产中也表现出色,广泛适用于包括汽车制造、医用服务、物流运输等多个行业。作为一款智能协作机器人,FR3可以与工人安全协作,通过精确的力控帮助完成各类精密任务。在医用场景中,FR3可与理疗辅助设备结合,辅助实现按摩等对力控有严格要求的任务。
机器人采摘草莓 来自Berry
机器人按摩 来自:Aescape
FR3还提供了AI Companion配件,这是一款集成了FCI、ROS和相机驱动程序的智能控制终端。Franka AI Companion 优雅地融合了您进行机器人和人工智能研究工作所需的硬件和软件,以简化设置流程并加速执行,同时还提供了NVIDIA® GPU加速的边缘计算能力和实时1kHz控制。
义昂智能作为Franka Robotics在中国区域的金牌经销商,致力于将最前沿的力控机器人技术引入科研和教育领域,推动机器人科研、人工智能研究和具身智能的发展。
义昂智能专注于帮助Franka Robotics在中国区域开展产品销售、渠道开拓、技术支持、市场推广等工作。他们与众多科研机构和高校紧密合作,提供先进的机器人平台,支持机器人科研和人工智能领域的创新研究,推动具身智能和人机交互技术的发展。
Franka Robotics的FR3机器人不仅是具身智能研究的理想平台,也是推动科研创新的重要工具。随着技术的不断进步,FR3机器人有望在未来的科研探索中发挥更大的作用,推动科学发现和技术创新,为全球科研贡献新的高度。同时,义昂智能与国内众多科研院所多年共同的投入,也为Franka Robotics在中国的发展注入源源不断的动力,共同开拓新兴应用场景和新的科研成果,共创辉煌未来。
 企业档案
企业档案 实力商家
实力商家 百姓认证
百姓认证