义昂智能
Franka金牌经销商tacbot.cn


 15000306001
15000306001

随着现代工业的发展和需求的不断提升,精密加工已呈现专业化发展方向,对零部件精度要求和机构设计的微型化需求越来越高。DeburringTec去毛刺&表面精加工展专注于如何实现“高速·高效·精密·微细·自动化·绿色化”的现代精密加工技术体系,推出系列前沿创新的技术、工艺、设备和应用,为工业零部件去毛刺、表面精加工与精密清洗等表面处理提供高效和可持续的技术与案例参考。
本期案例
Franka力控打磨抛光机器人系统
在客户愈加注重效率和质量的产品生产条件下,Franka力控打磨抛光机器人系统为市场应用端带来更多可能。
相比其他工艺,打磨抛光工艺一直比较难实现全自动化,特别是精细打磨且对打磨后的表面有较高工艺要求的,如注塑成型的汽车外观件合模线的打磨,医疗器械和精密零部件的打磨抛光。目前主流的自动化打磨方案还是采用了“被动柔顺”技术,即在机器人末端加上可浮动装置如弹簧、阻尼器、可调解气阀等,在常规场景中,这类方案已经得到了普及应用。

但是对于工艺性要求高的场景,“被动柔顺”技术方案的弊端就显现出来了,第一个是响应性受制于末端浮动装置,难以应对表面波动比较大的场景,当末端发生偏差的时候就算传感器采集到误差,很难在很短的时间里让机器人发生轨迹纠正;第二个是过程不可控,绝大多数末端浮动装置并未与机器人形成一个完整的控制闭环,工艺工程师无法通过一个量化的参数来调整工艺;第三个是程序规划困难,不论是离线仿真还是现场调试,打磨程序的最终效果严重依赖工件的位置精度,工件本身的轮廓精度和浮动装置多次使用后的一致性。第四个,也是最为严重的问题,无法在打磨按压力很小的情况下使用,比如软性材料的打磨如果采用机器人固定轨迹+被动柔顺的方案,往往会打磨不均匀,要么过磨要么没磨到。此类问题在机器人的末端额外加上力学传感器虽有一定的改善但依然难以形成一个完美的解决方案。

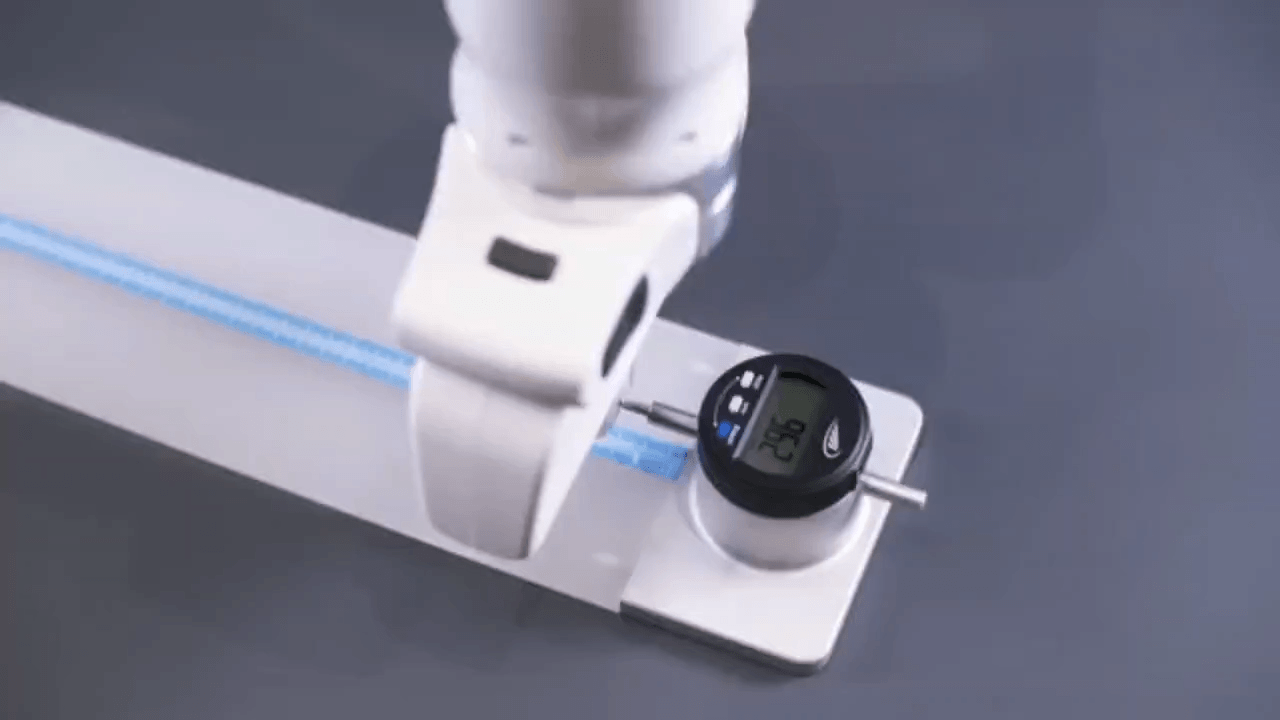
在之前问题的背景下,Franka Emika 公司尝试采用关节带有扭矩传感器的机器人来解决这个问题,Franka机器人具有0.05N的力分辨率,0.02Nm的力矩分辨率和1KHz 实时响应控制频率,在力控制和响应性上做到了全球同类型机器人领域的优质水准。在使用了关节力控型机器人后,就可以使用任何原来手工打磨的工具,而不需要设计复杂的浮动设备或定制的打磨工具,通过机器人本身的“柔顺力控”技术将打磨过程的所有参数量化,这些参数将由机器人系统统一控制,减少了过程的不可确定性。力位混合控制(Hybrid position/force control)的使用,可以让机器人在运行既定轨迹的同时,保持对磨具和被打磨工件之间稳定可控的按压力,达到一致的打磨效果。
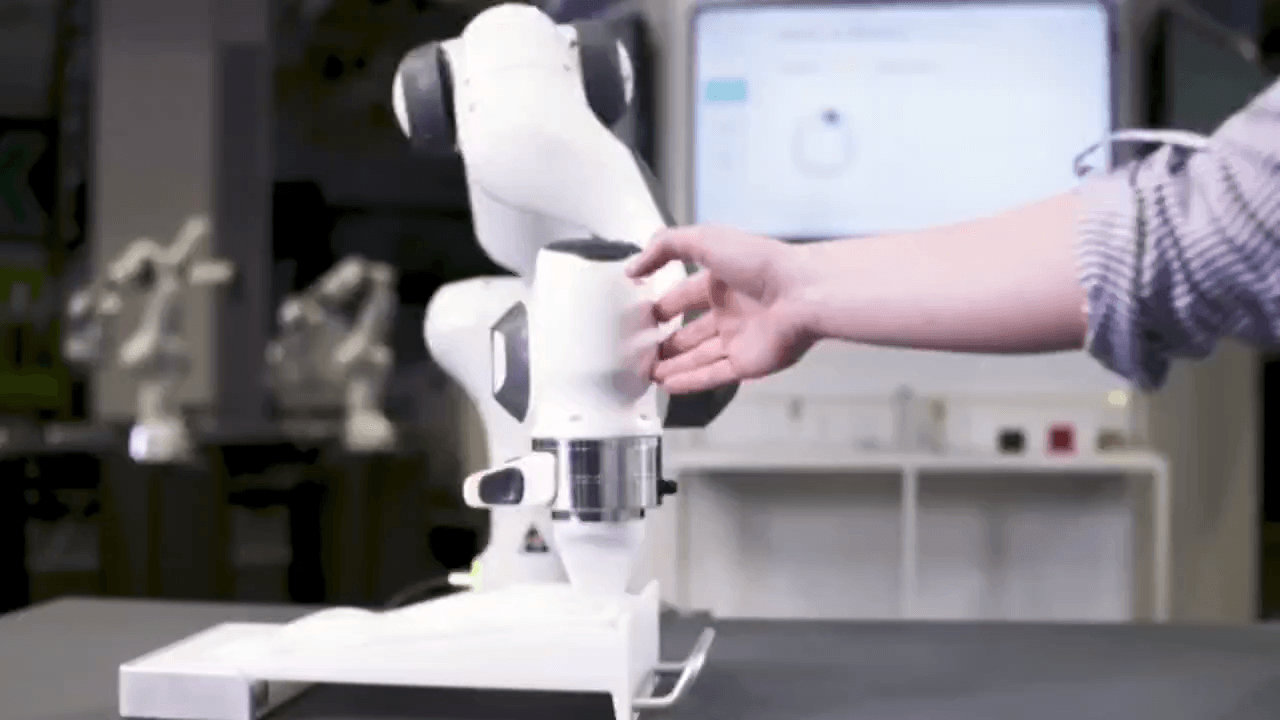
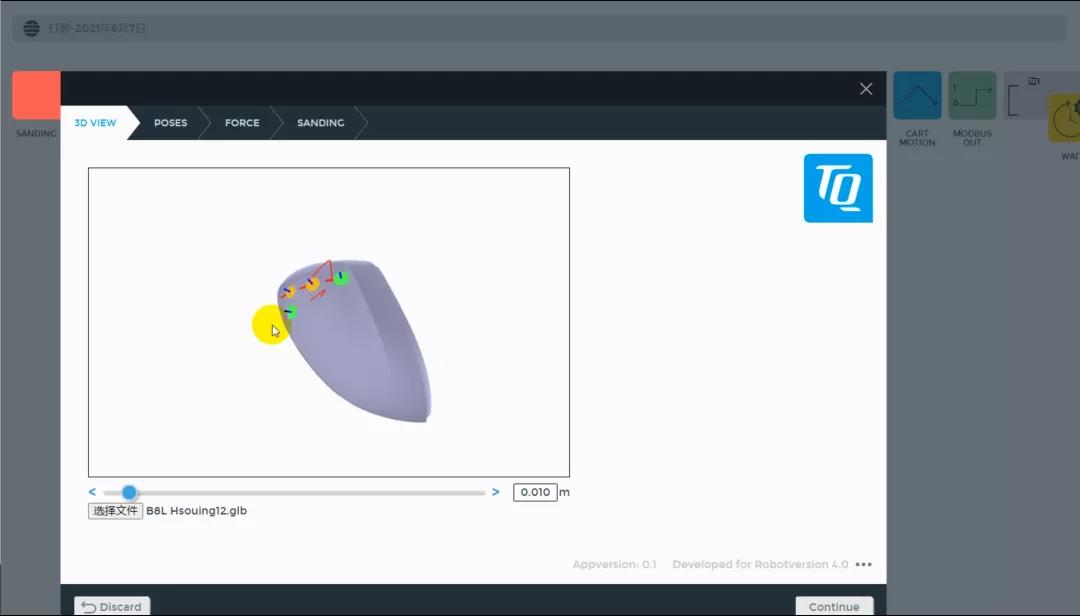
同时Franka Emika 公司也在人机界面上做了优化,用户可以直接通过导入数模,在编程界面随机拖拽示教一些点位,机器人可以自动生成轨迹,并跟踪曲面,保证打磨工具一直垂直于打磨面,大大减少了离线编程或者现场示教的时间。
今年以来,Franka力控打磨抛光机器人系统在车身外观件或者内饰件合模线的打磨与医疗精密零部件的打磨抛光市场案例中都取得了不俗的成绩。特别从汽车注塑件合模线打磨应用的客户反馈看,该公司设备打磨出的工件,要比人工打磨出的品质更高并且一致性好。Franka Emika 公司已经和多家汽车行业的头部客户达成有效的技术交流与合作。“同时我们公司也在优化整套设备的性能,如自动换砂纸机构,工件输送线等,在此我们也欢迎打磨行业拥有成套设备开发经验的集成商参与到我们的项目里来。”TQ Systems Shanghai Franka项目组卫卜源表示。
精细打磨工艺的自动化一直是整个行业的难点。Franka Emika 对此做了非常多的努力,在上海嘉定的Franka Emika 亚太区演示中心专门有一个团队投入到这个案例的研究工作中。同时,搭建了一个测试工作站,通过测试需求客户的数百个工件不断的优化机器人的各项参数。“通过对比测试和控制变量法测试最终优化了我们的程序,甚至我和我们的工程师多次在不同客户的打磨现场,了解人工打磨的技术要点,不同打磨工艺带来的不同变化,最终通过团队合作取得了不错的成果。”卫卜源谈到,“我们希望我们的开发成果能给更多的客户带来不同的技术思路和效果,最终达成双赢的局面。”

对于Franka力控打磨抛光机器人系统的未来期许,卫卜源表态:“我们不奢求Franka机器人能够给精细打磨行业带来翻天覆地的变化,我们只是静下心来不断发现更多的可能性,但是我们希望我们的技术和研究成果能给客户带来实实在在看得见的好处。我们只是恰巧将这项技术应用到了这个行业而已。未来还是要靠整个行业和广大合作商一起开发研究,努力突破。”
Franka Emika GmbH 成立于2016年,总部位于德国慕尼黑。创始人Sami Haddadin博士是全球机器人技术领域的权威专家之一。他受到人类敏捷性和触觉的启发,开发了一款基于APP的力控机器人。相比于视觉在机器人上的普及使用,带有力控制的协作机器人往往价格昂贵,而且需要专业的技术知识来操作,Franka Emika开始通过制造用户友好且经济实惠的力控机器人来颠覆这个行业。推出两年后Franka Emika协作机器人成为登上德国《时代》杂志封面的50个创新之一,并且获得了德国未来奖和创新奖。

 企业档案
企业档案 实力商家
实力商家 百姓认证
百姓认证